
Als Faustregel für Stereoaufnahmen gilt 1/30 der Nahentfernung. Klassische Stereokameras haben einen Objektivabstand von 65 mm. Da liegt die Nahentfernung bei ca. 2m. Heute benutzen wir gekoppelte Kameras auf einem Stereoschlitten und sind in der Wahl der Basis variabel. In der Landschaftsfotografie z.B. liegen aber Aufnahmeentfernungen vor, bei denen die notwendige Länge des Stereoschlittens nicht sinnvoll zu realisieren ist. Hyperstereos fertigt man auch bei Flugzeugaufnahmen, da ergibt sich die Basislänge aus Flugzeuggeschwindigkeit und Bildfolge. Im terrestrischen Fall kann man auf das Prinzip des Phototheodoliten zurückgreifen. Man stellt zwei Kameras im entsprechenden Abstand auf, richtet diese gegeneinander aus und dreht die Aufnahmerichtung rechtwinklig gegeneinander. Der Normalfall der Stereoskopie wird so näherungsweise erreicht. Digitale Korrekturen führen zum störungsfreien Raumbild.
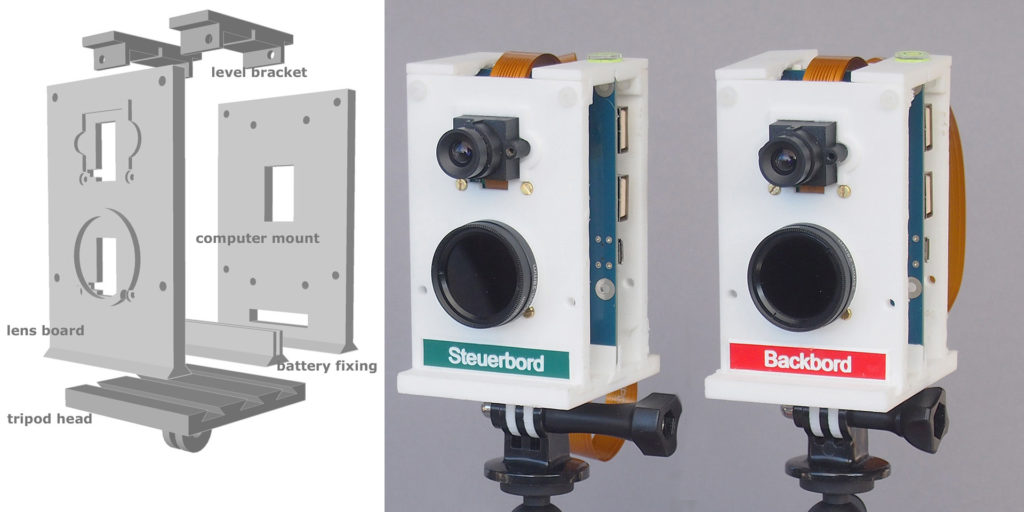
Ein derartiges Kamerasystem konstruieren wir aus zwei von Raspberry Pi Zeros gesteuerten Kameramodulen und einer Python-Software unterstützt durch die OpenCV-Bibliothek. Das Gehäuse bekommen die Kameras aus dem 3D-Drucker. Da wir mit den Kameramodulen großzügig umgehen können, werden gleich jeweils zwei eingebaut. Eines mit M12-Mounts für Wechselobjektive und eines mit NoIR Modulen für Infrarotaufnahmen. Zur hinreichenden synchronen Kameraauslösung gilt es eine geeignete Softwarestrategie zu finden. Die Bedienung der Kameras erfolgt über ein Mobilgerät ( Tablet, Smartphone) ohne Tastatureingaben. Mit einem mobilen Router hat man Zugang zu einem lokalen Netz und kann sich über einen VNC-Viewer die Desktops der ‘headless’ Rechner auf das Display des Mobilgerätes holen.