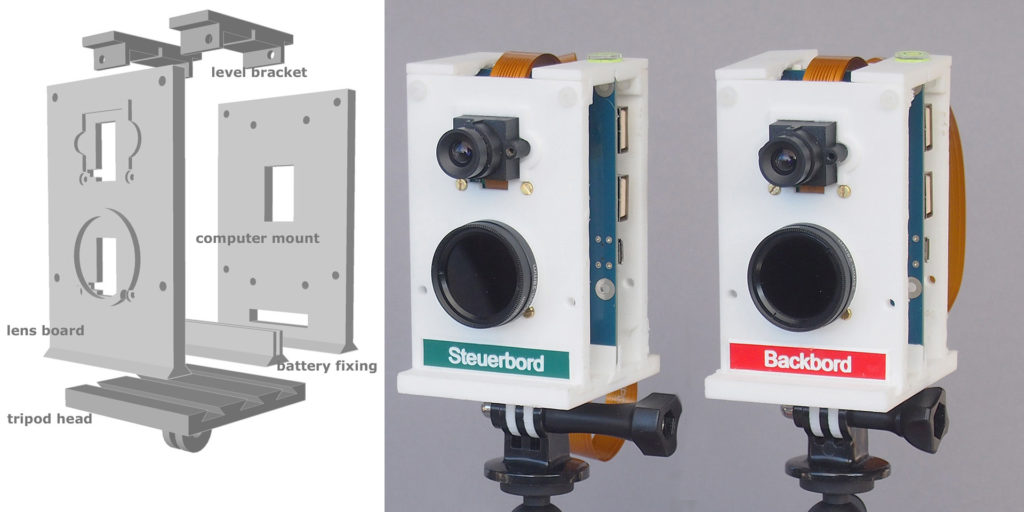
Im Post Infrarotfotografie wurden die Kameras Backbord/Steuerbord schon vorgestellt. Nun haben diese eine sichere Transportbox bekommen, die leicht im Rucksack zu transportieren ist. Infrarot-NW, WW und Tele können als Objektive eingesetzt werden.

Es existiert jetzt auch eine Light-Version der Kameras, die für den Test der Raspi-Zero Kameras gebaut wurde. Eine Bastelplatte einfach in eine Handyhalterung eingeschoben. 1/4 Zoll Stativgewinde inklusive.

Die Kameras laufen innerhalb eines Netzwerks, getriggert durch einen Master. Bildvorschau (Live-View) und Kameraeinstellungen sind individuell nutzbare Module. Die Synchronisation ist hier akzeptabel. Ein Point-and-shoot System haben wir nicht. Ausrichten und Kameraeinstellungen benötigen Zeit. Sobald aber die Kameraserver laufen, kann über das Smartphone oder scriptgesteuert ‘geschossen’ werden.
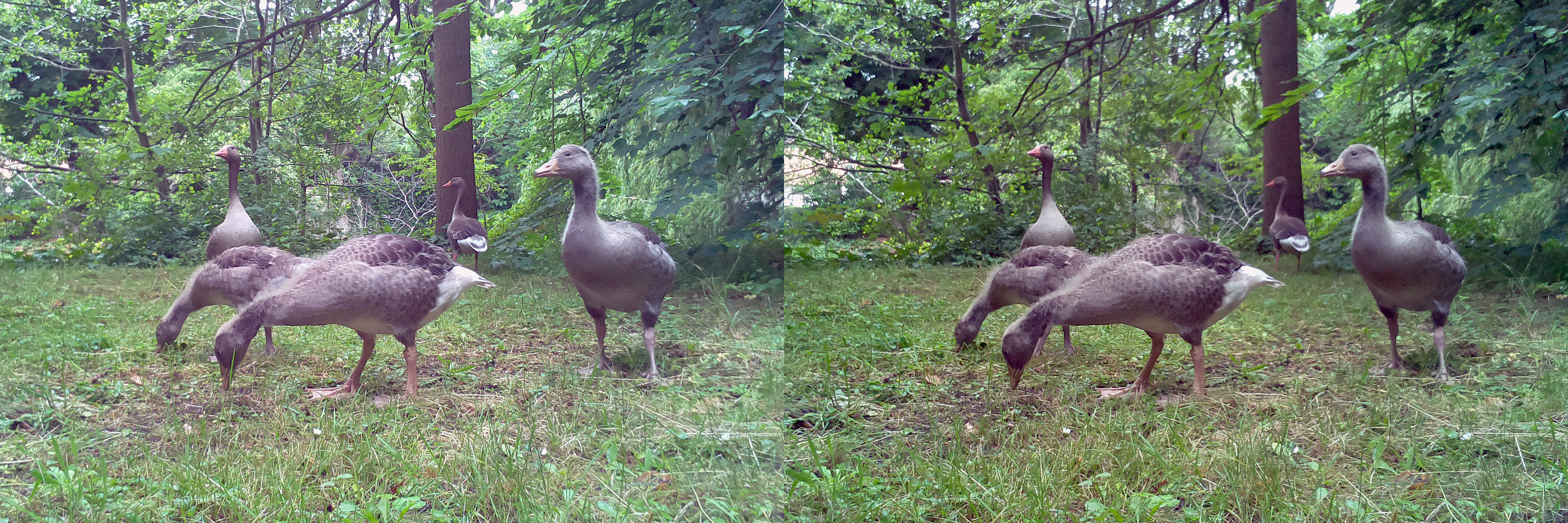
Wer meinen Blog bisher verfolgt hat, mag bemerken, dass es nun in die Produktionsphase geht. Infrarotbilder, Raumbilder, Zeitreihen, Subtraktion des Hintergrunds, Histogrammausgleich und weitere Techniken stehen zur Verfügung. Mit der neuen 12 MP HQ-Kamera der Raspberry Pi Foundation wird auch die Bildqualität höheren Ansprüchen gerecht werden.