In den 1970er Jahren war der Dia-Abend nach dem Urlaub Kult. Gereicht wurden Käsewürfel, Salzstangen und Kaltgetränke. Vor der Präsentation kam die Sichtung und Rahmung des Filmmaterials. Ein wichtiges Hilfsmittel war der einfache Dia-Gucki für Filmstreifen und gerahmte KB-Dias 24x36mm.
Malipit aus der DDR gab es in vielen Farben, damals waren die Anaglyphen auch noch rot / grün
Auf Trödelmärkten und Aktionsplattformen findet man noch eine Vielzahl dieser kleinen Plastikboxen. Dia einlegen und einfach gegen das Licht halten. Mit zwei Guckis auf einem Leuchtpult kann man auch prima 3D schauen.
Wo aber bekommt man die Dias her? Analog Cha-Cha, das geht noch. Digital belichten ist heute möglich. Fotos aus der Digitalkamera oder Renderings aus dem CAD-System. So schafft man sich ein leicht zugängliches analoges Archiv seiner digitalen Wertstücke. Wer Freude am Basteln hat, kann dem DIY Stereoskop auch eine entsprechende Karosserie verpassen. Hier haben wir die Anaglyphebrille, und die Sputnik-Kamera.
Foto einer Sputnik UDSSR Stereokamera mit Cenei F-Scope Guckis
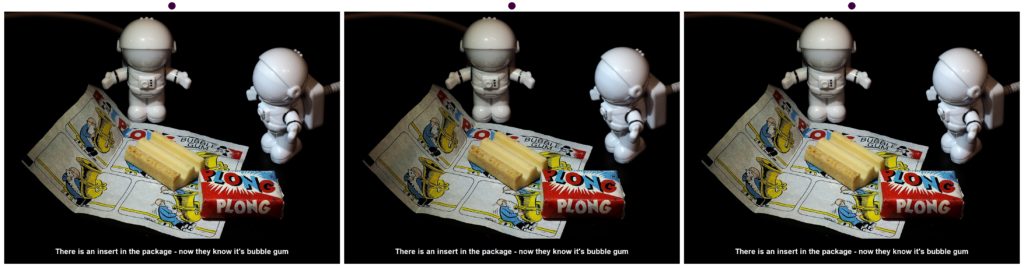
Tabletop liegt im Nahbereich oberhalb von Makrofotografie. ‘Objekte die auf dem Tisch liegen’, sind ein dankbares Fotomotiv für stereoskopisches Tabletop. Hier wird eine Bildserie über Kaugummi vorgestellt. Bei Klick in das obere Bild gelangen Sie zum HTML5-Viewer mit den Stereobildern. Es muss nicht immer mit Profiausrüstung gearbeitet werden. Auch eine Webcam leistet gute Dienste. Über die Programmierung kann man seine Aufnahme optimal der Situation anpassen. Viel Spaß!
2:36 min 2D oder Anaglyph. Auch auf YouTube hSbS für 3D-TV
Mit der Raspberry Pi HQ Cam eröffnet die Foundation ein neues Einsatzgebiet für den Mini-PC: Profi-Fotografie. Die Erweiterung bringt nicht nur einen verbesserten Sensor mit, sondern erlaubt sogar den Einsatz von handelsüblichen Objektiven. Aber auch mit der bewährten RasPi Cam erzeugen Sie mit etwas Programmcode und einer selbstgebastelten Halterung beeindruckende 3D-Aufnahmen, Infrarot-Fotos und Serienbilder. Hier geht es zum Magazin: https://www.raspberry-pi-geek.de/
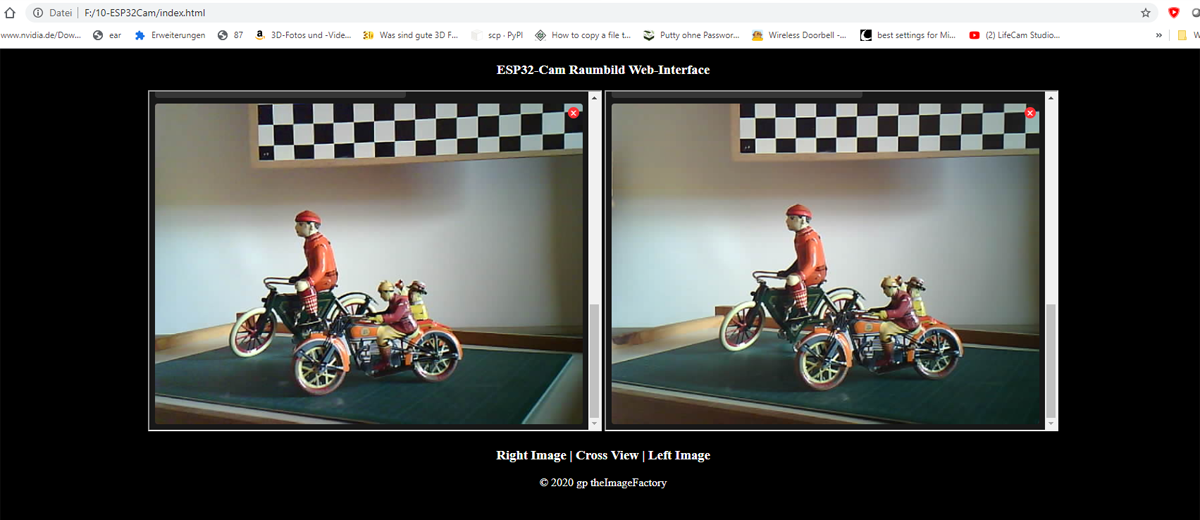
ESP32 ist ein Microchip von der chinesischen Firma Espressif. Produktmerkmale sind die 32-Bit CPU mit 240 Mhz Taktfrequenz und 520 KB RAM sowie WiFi und Bluetooth. Das ESP32-Cam Board ist mit einem OV 2640 Sensor, einer 2MP Kamera mit 1600 x 1200 px, und einem Slot für Micro-SD Karten ausgestattet.
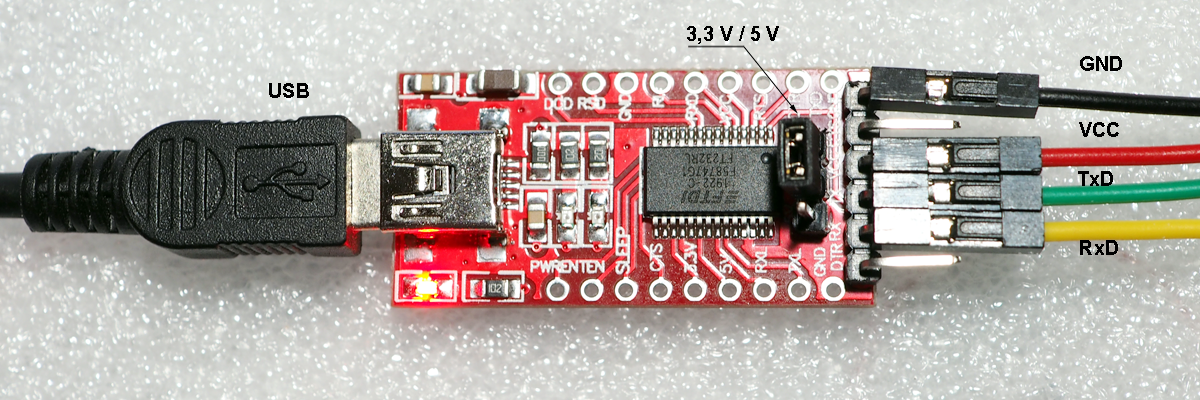
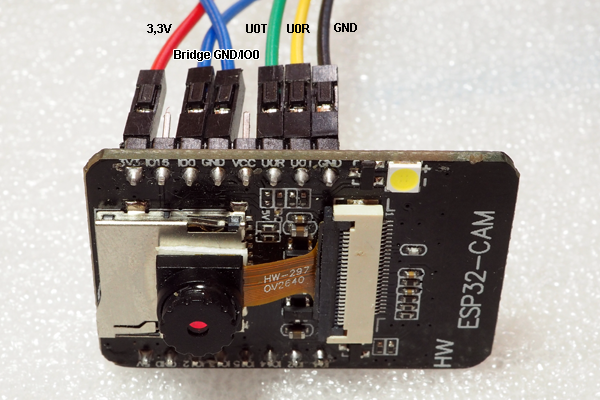
Da dem Board ein USB-Zugang fehlt, muss die Verbindung zum Rechner mit einem USB zu serial Konverter überbrückt werden. Mit female Jumper-Kabel stellt man die Verbindung entsprechend der Beschriftungen auf den Chips her: GND > GND, TxD > U0R, RdX > U0T, 3,3V > VCC. Eine Brücke auf dem ESP32-Cam zwischen IO0 und GND signalisiert den Empfangsmodus. Die Ausgangsspannung auf dem Konverter kann durch einen Jumper auch von 3,3 V auf 5V eingestellt werden. Vorsicht beim Anschluss an das ESP32-Board, das Eingänge für beide Spannungen hat. Die farbigen Kabel in den Abbildungen zeigen die korrekte USB Verbindung.
FDTI 232 USB – serial BridgeESP32-Cam
Programmiert wird mit der Arduino IDE. Für unserer Anwendung existiert bereits ein Webserver, in dem lediglich noch SSID und das Passwort für das WLan einzutragen sind. Im Boardverwalter der IDE wählt man Al Thinker ESP32-Cam aus. Unter Datei > Beispiele > ESP32 > Camera > Webserver gelangt man zum Webserver und überträgt diesen dann über > Sketch > Hochladen auf den Chip. Prinzipiell hat man auch Zugriff auf den HTML-Code des Servers, doch hier wollen wir nicht eingreifen. Lediglich das Interface bauen wir durch eine lokale Website, welche die Webinterfaces der ESP32-Cams in Iframes integriert, etwas um. Die Quellen der Iframes entsprechen den IPs der Kameras. Diese bekommen wir vom Portal des lokalen Routers und können sie dort als permanent registrieren.
Webinterface 3D-KameraBreadboard mit Netzteiladapter und 2 x ESP32-Cam
Die vorgestellte Laborlösung ist ein Steckbrett mit einem Breadboard Netzteiladapter, der über einen 9 V Akku versorgt wird. Fotografisch wird sicher kein high-end Ergebnis geliefert. Aber darauf kommt es hier auch nicht an. Zum Einstieg in die Technologie aber unbedingt empfehlenswert. Auch wird das Budget geschont. Wer Zeit hat, bestellt in China und bekommt alle Komponenten für um 25 Euro. Viel Spaß beim Basteln!
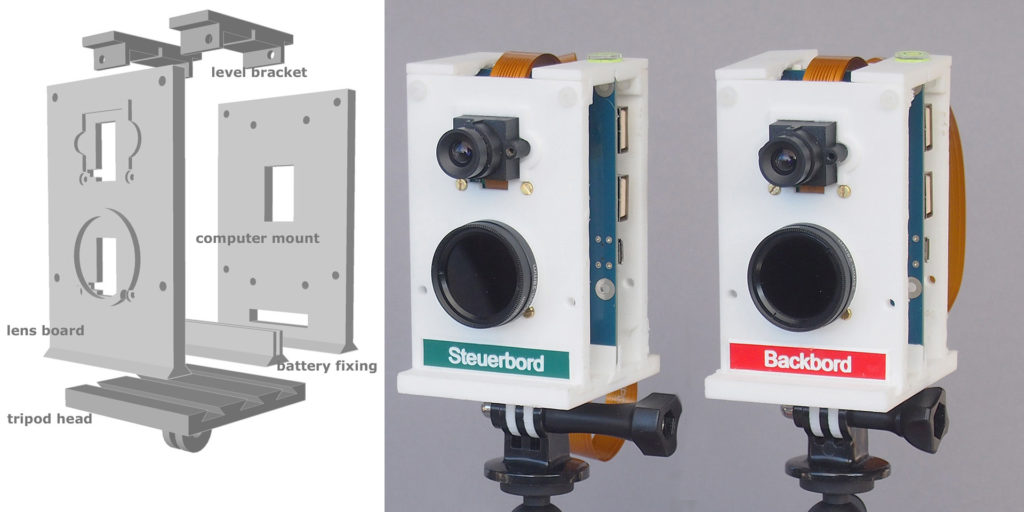
Im Post Infrarotfotografie wurden die Kameras Backbord/Steuerbord schon vorgestellt. Nun haben diese eine sichere Transportbox bekommen, die leicht im Rucksack zu transportieren ist. Infrarot-NW, WW und Tele können als Objektive eingesetzt werden.
Transportbox für die DIY-Stereokamera
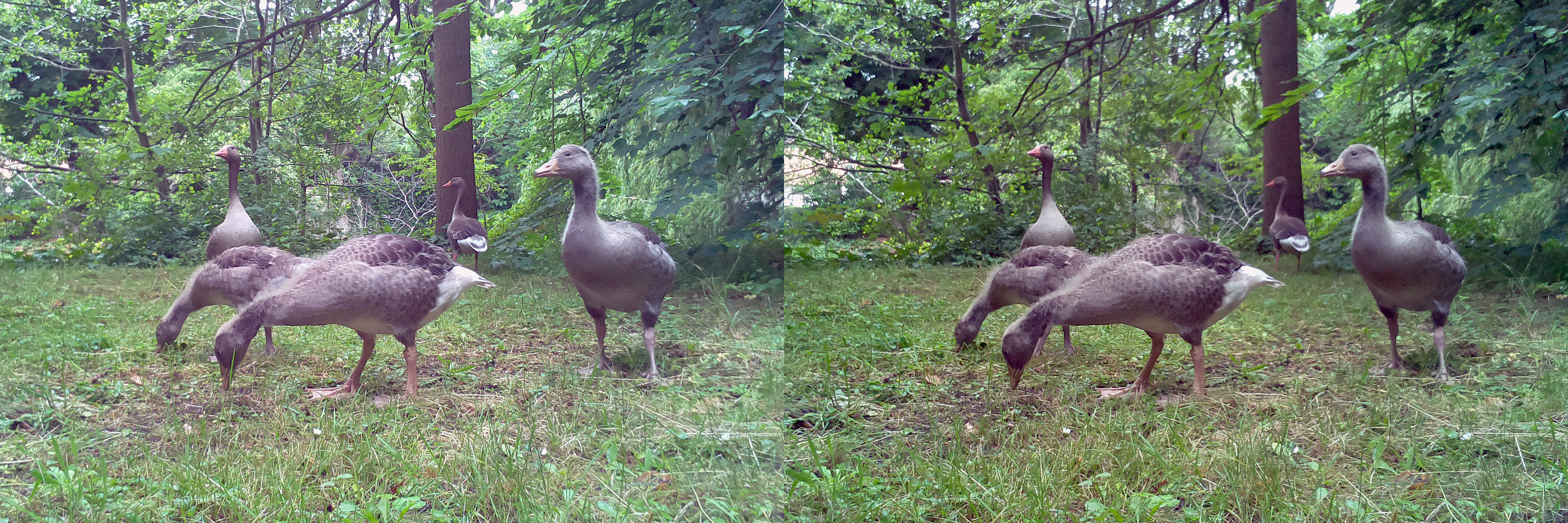
Es existiert jetzt auch eine Light-Version der Kameras, die für den Test der Raspi-Zero Kameras gebaut wurde. Eine Bastelplatte einfach in eine Handyhalterung eingeschoben. 1/4 Zoll Stativgewinde inklusive.
Light-Version der 3D-KameraGraugänse bei der Nahrungssuche. RPi Kamera V1 mit RPi Zero synchron
Die Kameras laufen innerhalb eines Netzwerks, getriggert durch einen Master. Bildvorschau (Live-View) und Kameraeinstellungen sind individuell nutzbare Module. Die Synchronisation ist hier akzeptabel. Ein Point-and-shoot System haben wir nicht. Ausrichten und Kameraeinstellungen benötigen Zeit. Sobald aber die Kameraserver laufen, kann über das Smartphone oder scriptgesteuert ‘geschossen’ werden.
Wer meinen Blog bisher verfolgt hat, mag bemerken, dass es nun in die Produktionsphase geht. Infrarotbilder, Raumbilder, Zeitreihen, Subtraktion des Hintergrunds, Histogrammausgleich und weitere Techniken stehen zur Verfügung. Mit der neuen 12 MP HQ-Kamera der Raspberry Pi Foundation wird auch die Bildqualität höheren Ansprüchen gerecht werden.
Eine fotografische Anregung für den kommenden Frühling: Interessante 3D-Motive können Figuren für die Modelleisenbahn im Maßstab 1:87 in der realen Welt liefern. Es muss also nicht immer die komplette Miniaturwelt sein. Hier sind es Hafenarbeiter aufgenommen mit Weitwinkel und großer Blende zur Erzielung des unscharfen Hintergrundes. Teilweise befindet sich die Kamera in Bodennähe. Die Basislänge liegt bei etwa 10 mm. Vordergrundschärfe erhält man durch Fokusstacking. Das universelle Stereoformat l-r-l ist für die freie Betrachtung vorgesehen. Aufgenommen mit der Olympus Pen FourThirds.
Nachdem die im Post zuvor
vorgestellten Kameras separat kalibriert wurden, gilt nun der erste
Feldeinsatz der Infrarotfotografie. Natürlich ist man
wetterabhängig, besonders Anfang November.
Das für den Menschen sichtbare Lichtspektrum liegt zwischen Wellenlängen von 380 -780 nm. Darüber hinaus, bis etwa 900 nm, wird der Bereich als Infrarot bezeichnet. Zur Vermeidung von Farbverfälschungen ist ein RGB-Sensor mit einem Sperrfilter für diesen Bereich ausgestattet. Verzichtet man auf diesen Sperrfilter, wie beim NoIR Kameramodul, dann erhält das Bild komplett eine violette Tönung. Nun ist das NoIR Kameramodul wohl eher als Night Vision Lösung konzipiert, also in der Dunkelheit bei Infrarotlicht Aufnahmen zu erstellen. Wir versuchen nun die spannenden Farbeffekte der Infrarotfotografie zu erzielen, indem wir Filter verschiedener Wellenlängen einsetzen, die eben das RGB Spektrum sperren und nur den Infrarotbereich ab dieser Wellenlänge zulassen. Auf das Kameragehäuse ist ein sog. Stepup-Ring geklebt, dadurch wird ein einfacher Filterwechsel ermöglicht.
Raspberry Pi Kamera NoIR mit 650 nm Filter. Nachfolgend 720 nm mit Nachbearbeitung durch Kanalmix und verstärkter Sättigung
Verwendet man einen 650
nm Filter, so erzielt man bei der Vegetation Goldtöne. Als Standard
gilt ein 720 nm Filter, der eher zum schwarzweiß Bereich neigt. In
der folgenden Bildbearbeitung ist es üblich, den Himmel mehr
herauszuarbeiten. Dafür nimmt man einen Kanaltausch blau gegen rot
vor. Erhöht man die Sättigung, kommt wieder etwas Farbe ins
Spiel. Es folgen hier erste Aufnahmen, die aber eher der Pflege des
Softwarehandlings dienten. Fotografische Meisterwerke sind es (noch)
nicht.
Als Faustregel für Stereoaufnahmen gilt 1/30 der Nahentfernung. Klassische Stereokameras haben einen Objektivabstand von 65 mm. Da liegt die Nahentfernung bei ca. 2m. Heute benutzen wir gekoppelte Kameras auf einem Stereoschlitten und sind in der Wahl der Basis variabel. In der Landschaftsfotografie z.B. liegen aber Aufnahmeentfernungen vor, bei denen die notwendige Länge des Stereoschlittens nicht sinnvoll zu realisieren ist. Hyperstereos fertigt man auch bei Flugzeugaufnahmen, da ergibt sich die Basislänge aus Flugzeuggeschwindigkeit und Bildfolge. Im terrestrischen Fall kann man auf das Prinzip des Phototheodoliten zurückgreifen. Man stellt zwei Kameras im entsprechenden Abstand auf, richtet diese gegeneinander aus und dreht die Aufnahmerichtung rechtwinklig gegeneinander. Der Normalfall der Stereoskopie wird so näherungsweise erreicht. Digitale Korrekturen führen zum störungsfreien Raumbild.
DIY Stereokamera mit Raspberry Pi Zero und Kameramodulen V2
Ein derartiges
Kamerasystem konstruieren wir aus zwei von Raspberry Pi Zeros
gesteuerten Kameramodulen und einer Python-Software unterstützt
durch die OpenCV-Bibliothek. Das Gehäuse bekommen die Kameras aus
dem 3D-Drucker. Da wir mit den Kameramodulen großzügig umgehen
können, werden gleich jeweils zwei eingebaut. Eines mit M12-Mounts
für Wechselobjektive und eines mit NoIR Modulen für
Infrarotaufnahmen. Zur hinreichenden synchronen Kameraauslösung gilt
es eine geeignete Softwarestrategie zu finden. Die Bedienung der
Kameras erfolgt über ein Mobilgerät ( Tablet, Smartphone) ohne
Tastatureingaben. Mit einem mobilen Router hat man Zugang zu einem
lokalen Netz und kann sich über einen VNC-Viewer die Desktops der
‘headless’ Rechner auf das Display des Mobilgerätes holen.
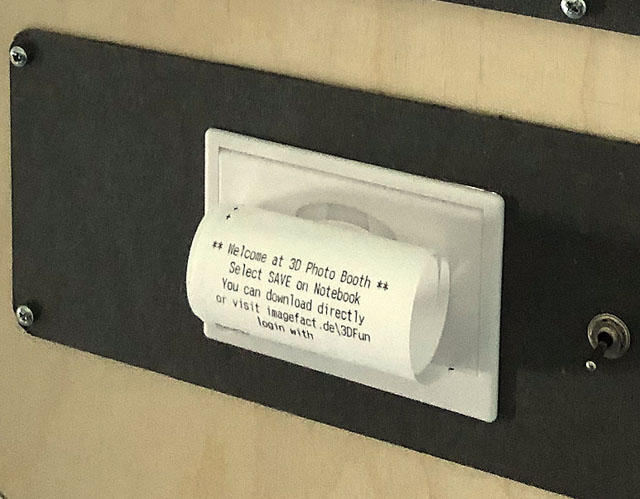
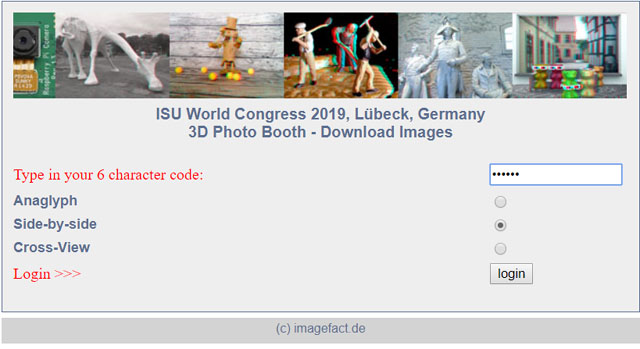
Was ist eigentlich aus der Photo Booth (vgl. Post August/September 2018) geworden? Die Kiste ist für eine Vorführung auf dem ISU World Congress 2019 in Lübeck gerüstet. Dafür wurde die Software getrimmt und auch der Datenschutz findet Berücksichtigung. Der Benutzer drückt den roten Button, positioniert sich und bekommt auf dem kleinen Quittungsdrucker einen sechstelligen Code in die Hand. QR-Code dient der Berücksichtigung der Privacy.
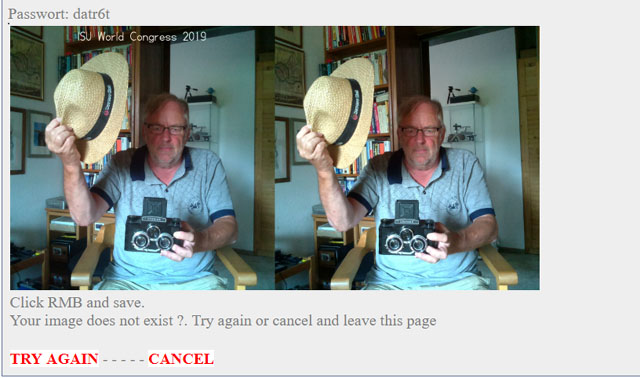
Nun kann man über das lokale Netz von einem Notebook die Stereoformate direkt auf das eigene Handy übertragen. Alternativ werden die Bilder über ein Webinterface für einige Zeit im Internet zum Download angeboten. Wer es auspropieren möchte: imagefact.de3DFun und exemplarisch der Code datr6t für ein S-b-S-Format. Webinterface : Eingabe der Authentifizierung und Auswahl des Stereoformats
n] Selfie im Side-by-Side Format
Es wird jetzt mit einem kalibrierten Stereorig aufgenommen. Die Bildpaare werden rektifiziert und in den Stereoformaten Anaglyphe, SbS oder Cross ausgegeben. Was ist noch zu tun? Depth Maps für 3D-Fotos liegen im Hintergrund bereit. Helligkeitsanpassung und Bildmontage sind in Arbeit. Aber die Synchronisation ist noch nicht ausgereizt. High-Speed Szenen werden wir nicht einfrieren können. Trotzdem bleibt im Vergleich zur augenblicklichen Lösung noch Luft.
Vom 17.-18. August 2019 findet im Congress Centrum Hannover wieder díe Maker Faire statt. Auf dieser Messe für Kreative und technisches Do-It-Your-self-Wissen werden am Wochenende etwa 20.000 Besucher erwartet.
Die Regionalgruppe Hannover der Deutschen Gesellschaft für Stereoskopie beteiligt sich mit einem Themenstand Stereoskopie und Virtuelle Realität. Auf einem 3D-Fernseher werden ausgewählte Raumbilder und 3D-Videos gezeigt. Weitere Exponate sind Anaglyphen, Phantogramme, VR und, dem Charakter der Messe entsprechend, Webcam-Aufnahmen mit dem Raspberry Pi.