
Es geht weiter mit der Entwicklung unserer Raspi 3D-Kamera. Der Prototyp, vgl. Post vom 15. April 2018, ist in einem Kodak-Hawkeye-Gehäuse eingebaut. Zwei Omnivision Kameras sind über das ArduCam-Multikamera-Board gekoppelt. Bedient wird die Software mit Hilfe von VNC über einen Drittrechner, vorzugsweise Smartphone. Nachteilig an der Camera obscura ist die unzureichende Synchronisationszeit. Im Bild zu sehen, das funktionsfähige Modell der 3D-Kamera im Kodak-Gehäuse.


Das weitere Kamerakonzept basiert jetzt auf zwei Raspberry Pi Zero W Rechnern, zwei Kameras ggf. mit Zusatzobjektiven und einem Schalter für die Synchronauslösung. Mit dem Python Modul gpiozero ist die Buttonabfrage denkbar einfach. Jetzt noch eine Stromversorgung und wir können mit minimaler Konfiguration eine Stereokamera bauen.
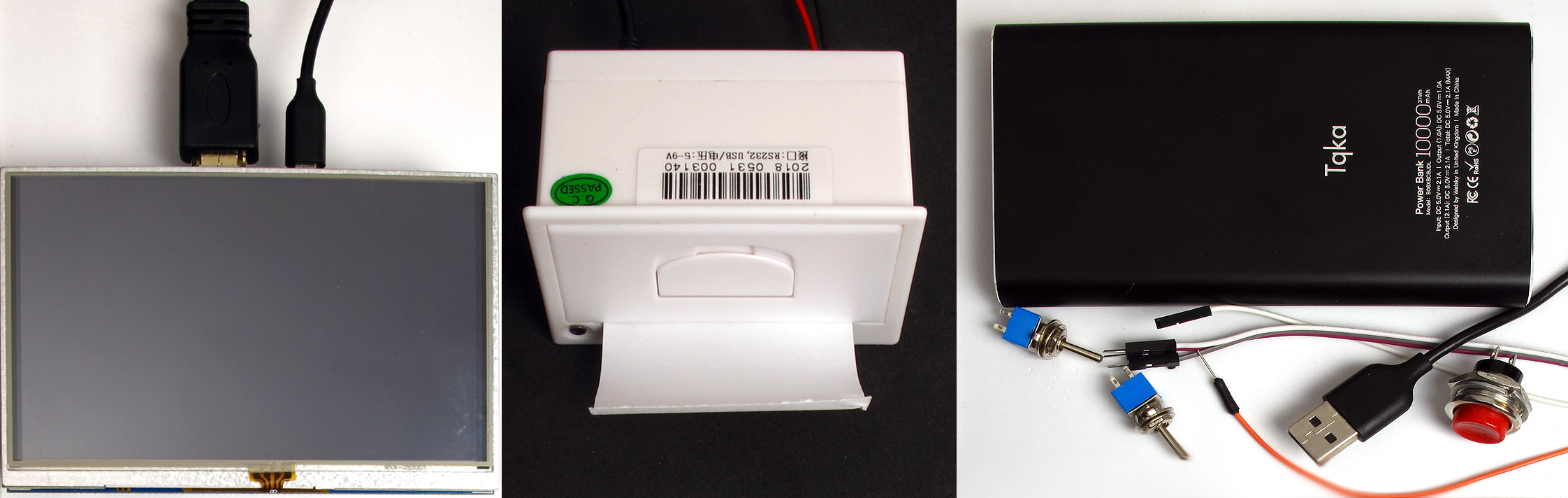
Wir wollen aber einen Schritt weitergehen und nicht die Minimalisierung im Auge behalten, sondern ein autonomes System erstellen. Die Kamera soll nach der Vorschau Halbbilder aufnehmen und das Stereoformat unmittelbar auf ein Fotoportal hochladen. Notwendig wird ein HDMI-Display für die Vorschau. Vorgesehen ist ein kleiner Drucker und später noch ein mobiler Hotspot. Wir benötiigen Stromversorgung, ein paar Kabel und Schalter.
Im nächsten Post wird über den Zusammenbau berichtet. Die Basis wird verschiebbar und wir konzipieren eine 3D Photo Booth. Bei Interesse sehen wir uns auf der Maker Faire in Hannover am 15. September.
![]()