Nachdem die im Post zuvor vorgestellten Kameras separat kalibriert wurden, gilt nun der erste Feldeinsatz der Infrarotfotografie. Natürlich ist man wetterabhängig, besonders Anfang November.
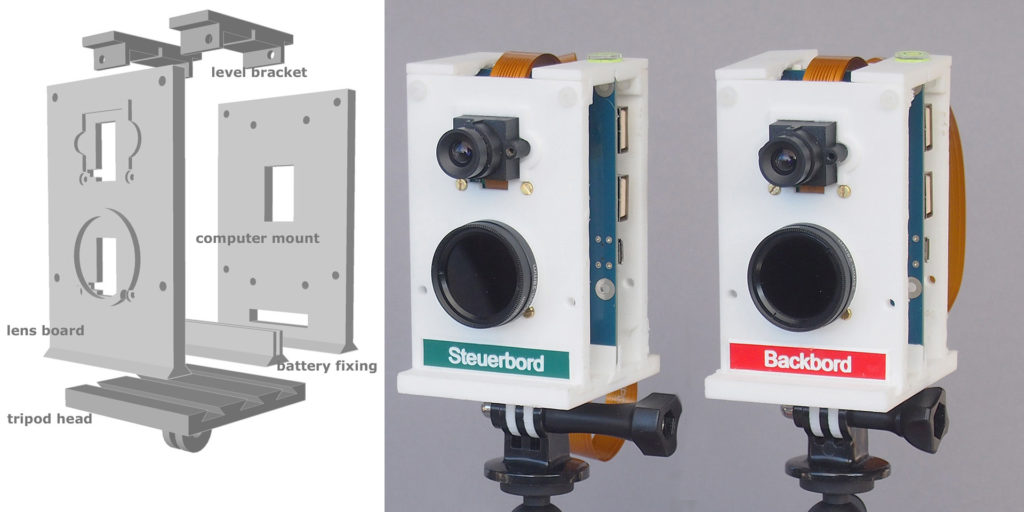
Das für den Menschen sichtbare Lichtspektrum liegt zwischen Wellenlängen von 380 -780 nm. Darüber hinaus, bis etwa 900 nm, wird der Bereich als Infrarot bezeichnet. Zur Vermeidung von Farbverfälschungen ist ein RGB-Sensor mit einem Sperrfilter für diesen Bereich ausgestattet. Verzichtet man auf diesen Sperrfilter, wie beim NoIR Kameramodul, dann erhält das Bild komplett eine violette Tönung. Nun ist das NoIR Kameramodul wohl eher als Night Vision Lösung konzipiert, also in der Dunkelheit bei Infrarotlicht Aufnahmen zu erstellen. Wir versuchen nun die spannenden Farbeffekte der Infrarotfotografie zu erzielen, indem wir Filter verschiedener Wellenlängen einsetzen, die eben das RGB Spektrum sperren und nur den Infrarotbereich ab dieser Wellenlänge zulassen. Auf das Kameragehäuse ist ein sog. Stepup-Ring geklebt, dadurch wird ein einfacher Filterwechsel ermöglicht.


Verwendet man einen 650 nm Filter, so erzielt man bei der Vegetation Goldtöne. Als Standard gilt ein 720 nm Filter, der eher zum schwarzweiß Bereich neigt. In der folgenden Bildbearbeitung ist es üblich, den Himmel mehr herauszuarbeiten. Dafür nimmt man einen Kanaltausch blau gegen rot vor. Erhöht man die Sättigung, kommt wieder etwas Farbe ins Spiel. Es folgen hier erste Aufnahmen, die aber eher der Pflege des Softwarehandlings dienten. Fotografische Meisterwerke sind es (noch) nicht.