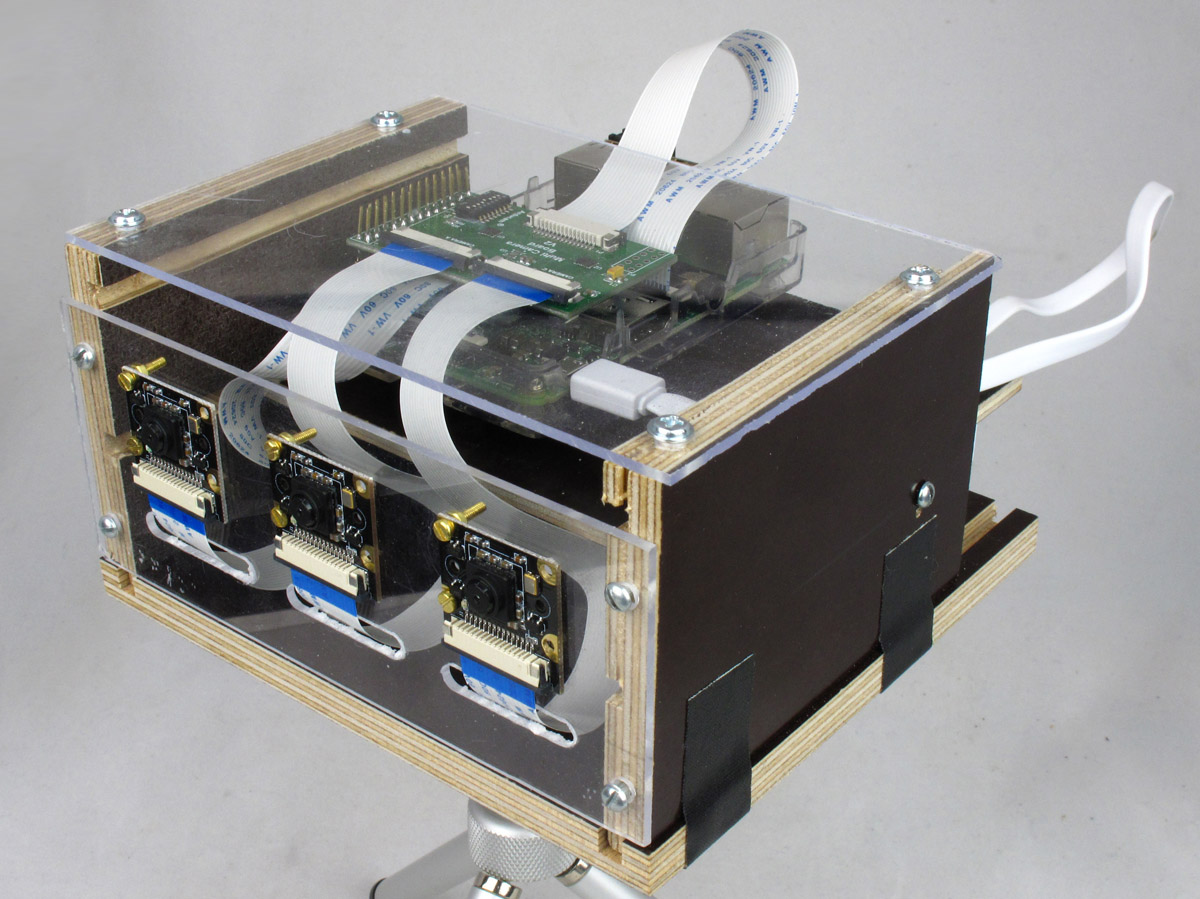
Meine Neue kurz vorgestellt: Der chinesische Hersteller Arducam bietet Kameralösungen für Arduino, Raspberry Pi und Nvidia Jetson an. Mit dem Camarray HAT können zwei 8 MP IMX219 Kameras an den Raspberry Pi angeschlossen werden. Der Arducam Chip nimmt seine Stromversorgung aus den GPIO Pins des Raspi und ist durch ein Flachbandkabel mit der CSI-Schnittstelle verbunden. Die Kameras können als Kameraboard mit einem festen Basisabstand von 80 mm oder separat mit vergrößerter Basis angeschlossen werden. Letztere mit 15 nach 22 Pin Flachbandkabeln.

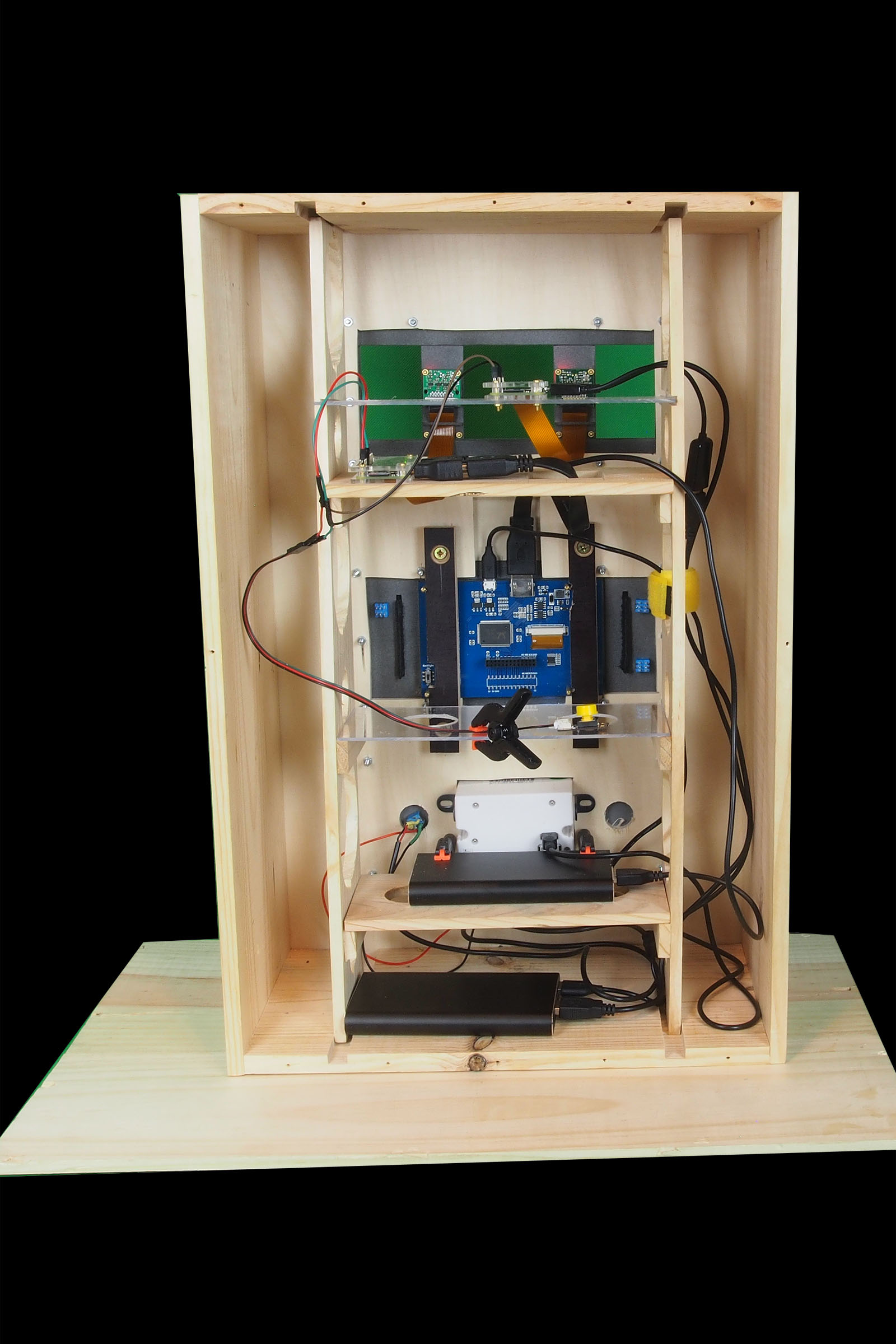
Die Komponenten: Rechner Raspi 4, Stromversorgung, Display und mobiler Router sind auf Einschüben montiert, so dass je nach Anwendung eine Modifikation der Kamera vorgenommen werden kann. Es ist ein völlig autarkes System mit Bedienung über das Display, Funktastatur und Auslösung über einen Push-Button möglich. Die Minimalausstattung benötigt ein lokales Netz und die Benutzersteuerung erfolgt über den VNC Client auf dem Mobilgerät.
Die Kamerasoftware ist mit Hilfe von GUIZero programmiert. Das Stereoformat der Aufnahme ist SbSh. Das System ist mit der OpenCV Prozedur kalibriert. Bilder werden im Stapelbetrieb mit Ffmpeg Unterstützung auf das volle Format hochgerechnet. Es folgt die Stereorektifizierung, Festlegung der Konvergenzebene und Cropping des gewünschten Bildausschnitts. Über den Praxistest wird im Folgepost berichtet.