Raspberry Pi Kamera Module werden von der Foundation seit 2013 veröffentlicht. Mit diesen Modulen wurden verschiedene Kamerasysteme gebaut, die für stereoskopische Anwendungen konzipiert sind. Hier ist der Link (klick hier) zu einem Filpbook. Das Buch zeigt 3D Aufnahmen als Anaglyphen und Stereocards von meist industriellen Objekten.
Die Raspberry Pi Foundation hat ein neues Kamera Modul herausgegeben. Ein 12 MPixel Sony IMX708 Sensor mit Autofokus, Standard oder Weitwinkel Objektiv, HDR Modus und wahlweise auch ohne Infrarotfilter. Hier wird ein Stereobild zum Test der Fokusebenen im Nahbereich gezeigt. Klick in das Bild zur Vergößerung.
RPi Camera Module 3: Joker Aufnahmeentfernung ca. 10 cm
Mit dem Synchronized Camarray HAT von Arducam wird mit vier Sony IMX519 Sensoren gleichzeitig ein 16 MP Frame aufgezeichnet. Das Objektivboard um den halben Sensorabstand verschoben liefert 4 weitere Bilder für ein Lentikularbild oder wie hier gezeigt für Wiggles. Klicken Sie den Link zur Demoseite mit einigen ersten Aufnahmen.
DIY-QuadCam mit Raspberry Pi 4 im Netz über VNC bedient
Hier sind sie nun endlich, die versprochenen Testbilder. Der ausführliche Testbericht erschien im Stereo Journal der DGS in Heft 4/2021. Das Bild Touristen prüfte die Eignung der Fernbedienung mit dem Handy in der Praxis. Der Springbrunnen lässt auf eine brauchbare Synchronisation schliessen. Klicken Sie in die Bilder zur Vergrößerung.
Toristen, farbverfälscht.Springbrunnen in FallerslebenKanalbrücke
Mit Klick auf die Links besuchen Sie die kleinen Leute, lernen Captain Scarlet kennen oder schauen das Weltraum-Spielzeug an. Tabletop 3D! Zurück mit der Browser Navigation.
Meine Neue kurz vorgestellt: Der chinesische Hersteller Arducam bietet Kameralösungen für Arduino, Raspberry Pi und Nvidia Jetson an. Mit dem Camarray HAT können zwei 8 MP IMX219 Kameras an den Raspberry Pi angeschlossen werden. Der Arducam Chip nimmt seine Stromversorgung aus den GPIO Pins des Raspi und ist durch ein Flachbandkabel mit der CSI-Schnittstelle verbunden. Die Kameras können als Kameraboard mit einem festen Basisabstand von 80 mm oder separat mit vergrößerter Basis angeschlossen werden. Letztere mit 15 nach 22 Pin Flachbandkabeln.
DIY Stereokamera mit Arducam Camarray HAT
Die Komponenten: Rechner Raspi 4, Stromversorgung, Display und mobiler Router sind auf Einschüben montiert, so dass je nach Anwendung eine Modifikation der Kamera vorgenommen werden kann. Es ist ein völlig autarkes System mit Bedienung über das Display, Funktastatur und Auslösung über einen Push-Button möglich. Die Minimalausstattung benötigt ein lokales Netz und die Benutzersteuerung erfolgt über den VNC Client auf dem Mobilgerät.
Die Kamerasoftware ist mit Hilfe von GUIZero programmiert. Das Stereoformat der Aufnahme ist SbSh. Das System ist mit der OpenCV Prozedur kalibriert. Bilder werden im Stapelbetrieb mit Ffmpeg Unterstützung auf das volle Format hochgerechnet. Es folgt die Stereorektifizierung, Festlegung der Konvergenzebene und Cropping des gewünschten Bildausschnitts. Über den Praxistest wird im Folgepost berichtet.
In den 1970er Jahren war der Dia-Abend nach dem Urlaub Kult. Gereicht wurden Käsewürfel, Salzstangen und Kaltgetränke. Vor der Präsentation kam die Sichtung und Rahmung des Filmmaterials. Ein wichtiges Hilfsmittel war der einfache Dia-Gucki für Filmstreifen und gerahmte KB-Dias 24x36mm.
Malipit aus der DDR gab es in vielen Farben, damals waren die Anaglyphen auch noch rot / grün
Auf Trödelmärkten und Aktionsplattformen findet man noch eine Vielzahl dieser kleinen Plastikboxen. Dia einlegen und einfach gegen das Licht halten. Mit zwei Guckis auf einem Leuchtpult kann man auch prima 3D schauen.
Wo aber bekommt man die Dias her? Analog Cha-Cha, das geht noch. Digital belichten ist heute möglich. Fotos aus der Digitalkamera oder Renderings aus dem CAD-System. So schafft man sich ein leicht zugängliches analoges Archiv seiner digitalen Wertstücke. Wer Freude am Basteln hat, kann dem DIY Stereoskop auch eine entsprechende Karosserie verpassen. Hier haben wir die Anaglyphebrille, und die Sputnik-Kamera.
Foto einer Sputnik UDSSR Stereokamera mit Cenei F-Scope Guckis
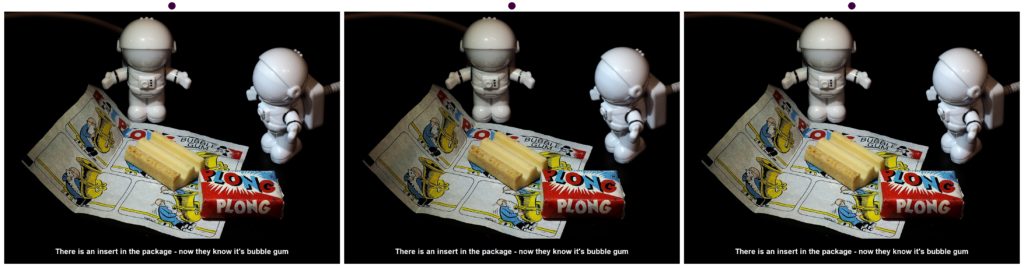
Tabletop liegt im Nahbereich oberhalb von Makrofotografie. ‘Objekte die auf dem Tisch liegen’, sind ein dankbares Fotomotiv für stereoskopisches Tabletop. Hier wird eine Bildserie über Kaugummi vorgestellt. Bei Klick in das obere Bild gelangen Sie zum HTML5-Viewer mit den Stereobildern. Es muss nicht immer mit Profiausrüstung gearbeitet werden. Auch eine Webcam leistet gute Dienste. Über die Programmierung kann man seine Aufnahme optimal der Situation anpassen. Viel Spaß!
2:36 min 2D oder Anaglyph. Auch auf YouTube hSbS für 3D-TV
Mit der Raspberry Pi HQ Cam eröffnet die Foundation ein neues Einsatzgebiet für den Mini-PC: Profi-Fotografie. Die Erweiterung bringt nicht nur einen verbesserten Sensor mit, sondern erlaubt sogar den Einsatz von handelsüblichen Objektiven. Aber auch mit der bewährten RasPi Cam erzeugen Sie mit etwas Programmcode und einer selbstgebastelten Halterung beeindruckende 3D-Aufnahmen, Infrarot-Fotos und Serienbilder. Hier geht es zum Magazin: https://www.raspberry-pi-geek.de/